Quarta-técnica – Uso de malhas sobrepostas para avaliação de problemas com movimentação de corpos rígidos
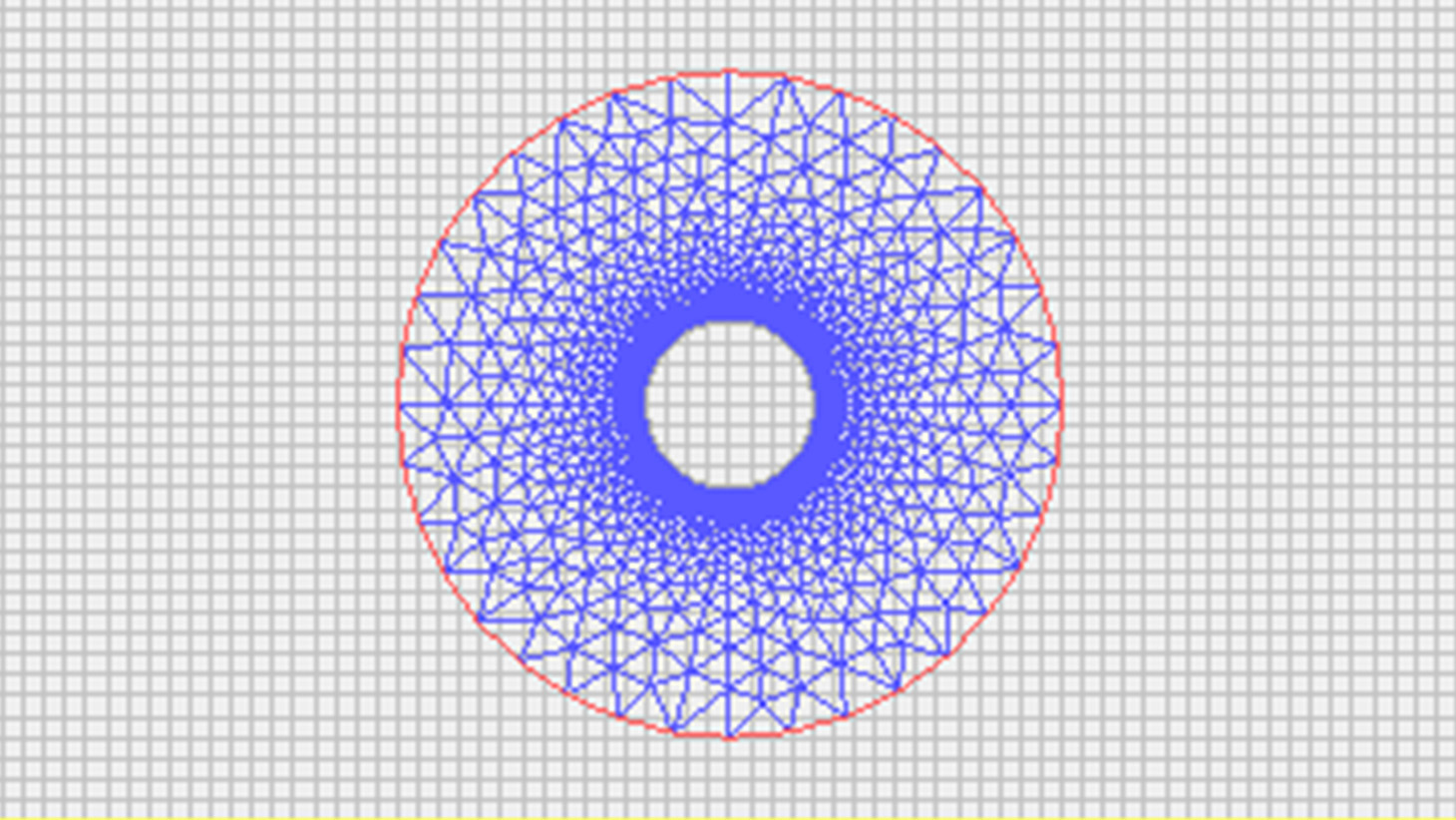
O uso de malhas sobrepostas visa utilizar duas ou mais malhas para um mesmo problema, onde uma malha definirá o domínio como um todo, e as demais serão responsáveis por definir os detalhes deste domínio. Como apresentado na Figura 1, a malha na cor cinza representa o domínio e a malha na cor azul define um detalhe da geometria. A versão 17.0 da ANSYS trouxe esta nova aplicação para o Fluent, o uso de malhas sobrepostas (Overset Mesh).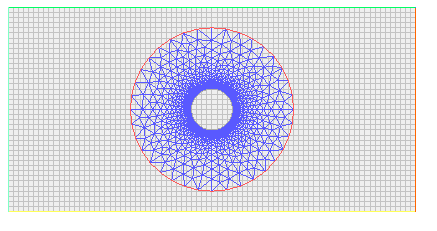
Figura 1. Malhas sobrepostas (Overset Mesh)
Desta forma, esta aplicação pode ser utilizada em casos onde a geometria possui detalhes locais, onde a malha pode ser gerada localmente para discretização desta região, ou mesmo para casos onde há movimentação de malha em torno de uma determinada parede ou sólido, permitindo o deslocamento relativo da malha em torno do corpo rígido sem sua deformação, evitando o uso do re-meshing ou smoothing da malha. Sendo assim, o uso de malhas sobrepostas torna-se uma alternativa para problemas com movimentação de corpos rígidos (6DoF) por proporcionar maiores deslocamentos com menor custo computacional.
Testes de movimentação de corpos rígidos (6DoF) com e sem o uso de Overset Mesh apresentaram uma redução do tempo computacional de aproximadamente 40% quando utilizando malhas sobrepostas. Para os testes foi considerada a queda livre de uma esfera em água, assumindo um tempo total de queda de 7e-1 segundos, com um passo de tempo de 1e-3 segundos. A tabela 1 apresenta o tempo computacional de cada uma das simulações. Estes resultados mostram a abordagem proposta, o uso de 6DoF com Overset Mesh como uma alternativa viável com um menor custo computacional para este tipo de problema.

Tabela 1. Tempo computacional gasto utilizando diferentes abordagens para um problema de movimentação de corpos rígidos (6DoF).
No caso do uso de malhas sobrepostas em problemas com movimentação de corpos rígidos, é necessário possuir no mínimo duas malhas, uma contendo o domínio completo e outra nas proximidades das paredes do corpo, esta última irá se movimentar obedecendo aos graus de liberdade estabelecidos para a movimentação do corpo. É importante garantir que os elementos na região de sobreposição possuam tamanhos compatíveis, sendo recomendado o uso de um tamanho de malha na região de sobreposição de até duas vezes o tamanho dos elementos da malha adjacente.
Para carregar as malhas no Fluent é necessário primeiramente ler uma malha utilizando “Read > Mesh”, já as demais malhas serão carregadas em “Append > Append Case File”. Com as malhas carregadas, deve-se definir as fronteiras externas das malhas sobrepostas como uma condição de contorno do tipo “Overset”, assim o solver entenderá que há sobreposição e que os valores serão interpolados entre as duas malhas. É importante ressaltar que uma baixa qualidade na interface entre as malhas pode levar a resultados inválidos. Com a condição de contorno de “Overset” definida, é necessário definir a interface entre as duas malhas em “Overset Interfaces”, conforme mostra a figura 2.

Figura 2.Setup da interface entre as malhas sobrepostas.
Percebe-se que é bastante simples a montagem de um setup para malhas sobrepostas. Vale ressaltar que para garantir bons resultados é importante que a qualidade das malhas esteja adequada e que o tamanho de malha na região de sobreposição seja de até duas vezes o tamanho dos elementos da malha adjacente.
O ponto principal deste artigo é o uso deste tipo metodologia para a movimentação de corpos rígidos. Este procedimento pode ser utilizado para qualquer problema que utilize malhas sobrepostas. Em CFD, a movimentação de corpos se dá definindo a massa do corpo, os componentes do momento de inércia do corpo e quaisquer outras forças, além das forças exercidas pelo fluido sobre esse corpo. Estas informações irão definir os graus de liberdade para a movimentação deste objeto. É possível definir até seis graus de liberdade, dois graus na direção x, dois na direção y e dois em z. Até a versão 17.1, o Fluent necessitava de uma UDF para definir estas informações, como mostra a figura 3. A partir da versão 17.2, estas informações podem ser inseridas pelo usuário diretamente na interface do solver, como na figura 4.
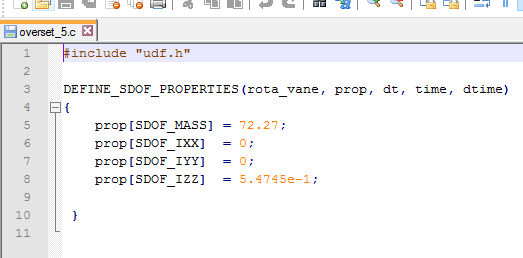
Figura 3. UDF simplificada para determinação dos graus de liberdade do corpo.
 Figura 4. Setup 6DoF no Fluent v.17.2.
Figura 4. Setup 6DoF no Fluent v.17.2.
Após definir os graus de movimento, deverá ser definido que a malha sobreposta contém um corpo rígido e que essa malha irá se movimentar acompanhando o movimento do objeto. Para isto, é necessário definir tanto a região da malha sobreposta como a condição de contorno da parede do corpo como sendo do tipo “Rigid Body” em “Dynamic Mesh Zones”. É válido ressaltar que a malha deve ser definida como passiva, habilitando a opção “Passive”, conforme a Figura 5. Esta opção define que a malha não será influenciada pelo escoamento, apenas irá acompanhar o movimento da condição de contorno das paredes do objeto. Desta forma, esta opção deverá estar desabilitada para as paredes do objeto.
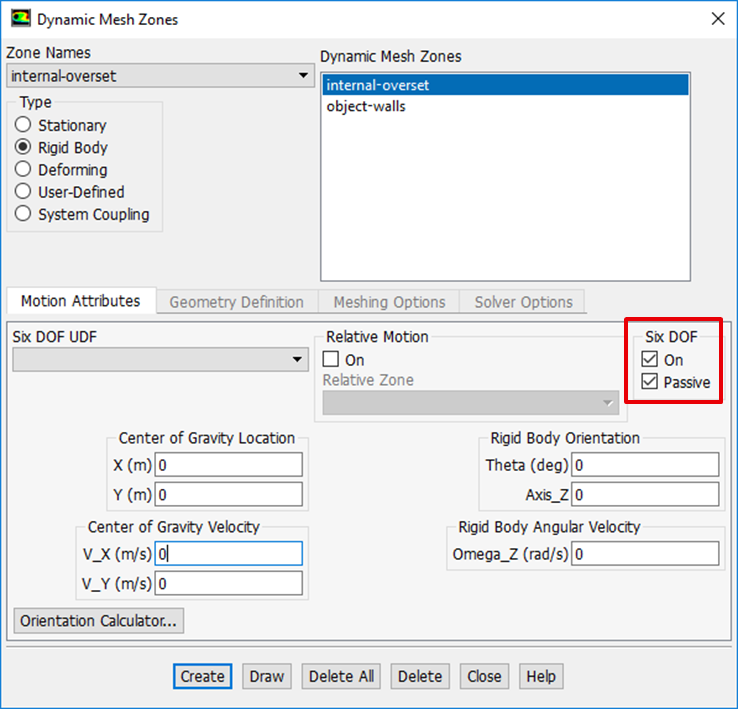
Figura 5. Setup das regiões do corpo rígido.
O modelo 6DoF ainda não trata a interação do objeto com as paredes do domínio. Portanto, o modelo exige que haja no mínimo três elementos de malha entre as paredes do corpo e as fronteiras do domínio. Esta limitação é apenas do modelo 6DoF, ou seja, mesmo utilizando-o sem o recurso de malhas sobrepostas, ainda é necessário respeitar esta limitação. Com relação ao uso de malhas sobrepostas, por ser uma metodologia nova, o pós- processamento até a versão atual (v.17.2) é limitado para o CFD-Post.